Tags:
view all tags
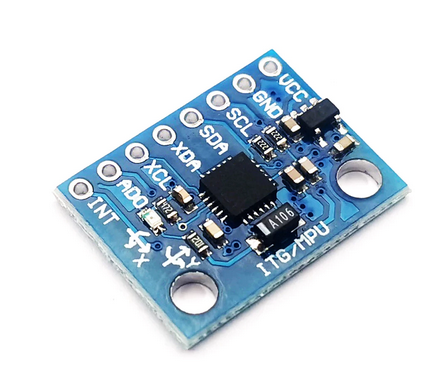
---+ MPU6050, un accéléromètre et gyroscope ---++ Introduction Le MPU6050 est un circuit integré qui contient un accéléromètre pour et un gyroscope. L'accéléromètre mesure laccélération statique dans les trois axes, tandis que le gyroscope mesure la rotation autour ces trois axes. Pour une description détaillé voir sa [[https://cdn.sparkfun.com/datasheets/Components/General%20IC/PS-MPU-6000A.pdf][fiche technique]] et la [[https://invensense.tdk.com/wp-content/uploads/2015/02/MPU-6000-Register-Map1.pdf][description des régistres]]. Un [[https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050][pilote très complet]] a été écrit pour lArduino en C++ par Jeff Rowberg et jai transcrit ce pilote en !MicroPython. Le pilote est disponible sur github: https://github.com/uraich/IoT-Course/tree/master/exercises/solutions/exercise_16/mpu6050. <img alt="mpu6050.png" src="%ATTACHURL%/mpu6050.png" title="mpu6050.png" /> ---++ Exercise 1: !I2C scan Connecter le MPU6050 avec la carte CPU sur les pins Vcc, GND, SDA,SCL et INT. | *MPU6050* | *WeMos D1 bus* | *GPIO* | | Vcc | 5V | | | GND | GND | | | SCL | D1 | 22 | | SDA | D2 | 21 | | INT | D0 | 26 | <br />Exécuter le program [[https://github.com/uraich/IoT-Course/blob/master/exercises/solutions/i2c/i2cScan.py][i2cScan.py ]]et vérifier que le MPU6050 est reconnu sur le bus !I2C. ---++ Exercise 2: Vérification du régistre d'identification Étudier le pilote du MPU6050 et le comparer avec la documentation des régistres. Créer un objet MPU6050 et lire le régistre Who_AM_I. Vérifier qu'on lit le code identificateur décrit dans la fiche technique ---++ Exercice 3: Lecture des données Lire les données brutes de l'accéléromètre et du gyroscope et convertir ces valeurs dans des données physique (unité *g* pour l'accélération et <b>dps: </b>degrées par seconde, pour le gyroscope). Est ce que ces valeurs sont raisonbles?. Pour l'accélération on doit trouver 1g pour la direction vertical, zéro pour les autres. ---++ Exercice 4: Calibration Calibrer le MPU6050. Voir l'exemple IMU_Zero.py ---++ Exercice 5: Interruptions movement et inactivité Écrire un program qui détecte le movement et l'inactivité. Générer et capter des interruptions pour les deux cas. ---++ Exercice 6: Lecture du !FiFo Lire l'accélération et rotation en utilisant le !FiFo. -- %USERSIG{UliRaich - 2022-02-21}% ---++ Comments %COMMENT%
Attachments
Attachments
Topic attachments
I
Attachment
History
Action
Size
Date
Who
Comment
png
mpu6050.png
r1
manage
167.5 K
2022-02-21 - 15:14
UliRaich
Edit
|
Attach
|
Watch
|
P
rint version
|
H
istory
:
r3
<
r2
<
r1
|
B
acklinks
|
V
iew topic
|
Raw edit
|
More topic actions...
Topic revision: r1 - 2022-02-21
-
UliRaich
Home
Site map
AFNOG web
Embedded_Systems web
IoT_Course_English web
IoT_Course_French web
Main web
Sandbox web
TWiki web
IoT_Course_French Web
Create New Topic
Index
Search
Changes
Notifications
RSS Feed
Statistics
Preferences
View
Raw View
Print version
Find backlinks
History
More topic actions
Edit
Raw edit
Attach file or image
Edit topic preference settings
Set new parent
More topic actions
Account
Log In
Register User
Edit
Attach
Copyright © 2008-2025 by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Ideas, requests, problems regarding TWiki?
Send feedback



{kind=link}
{kind=link}