Exercices Moteurs
Introduction
Nous avons trois types de moteurs pour différents applications et qui sont contrôlé de manière différent:-
Moteur à courant continu (Moteur DC), utilisé pour un mouvement continu, par exemple pour faire bouger un châssis de voiture robot ou pour faire marcher une hélice.
-
Servomoteur : un moteur qui permet daller à un angle précis, p.e. pour diriger une voiture modèle de voiture ou davion.
- Moteur pas à pas.Ce moteur peut remplacer soit le moteur DC soit le servomoteur. Ce moteur bouge dans des pas discret et on compte les nombres de pas pour avancer une distance ou un angle voulu.
| Moteur à courant continu | Servomoteur | Moteur pas à pas |
 |
 |
 |
Contrôle du moteur à courant continu
Le Kit Freenove prévoit deux différents modes de contrôle pour le moteur à courant continu :-
Contrôle par relais
-
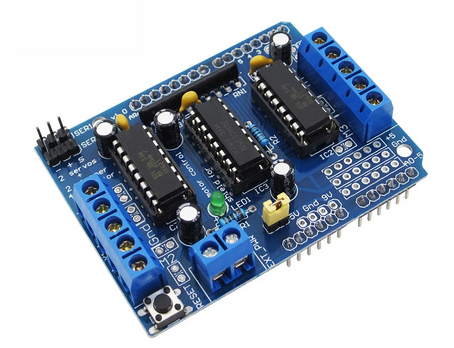
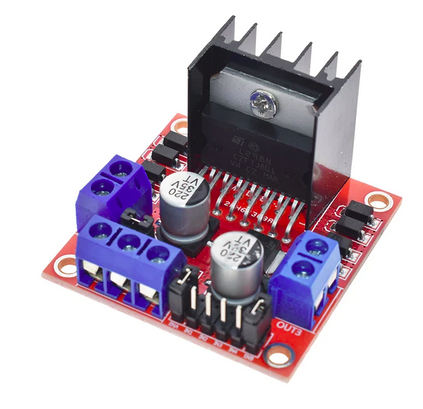
Un contrôleur basé sur le chip L293D
Exercice 1: Contrôle du moteurs DC par relais
Le moteur utilise une alimentation de 5V, ~ 200 mA. Pour cette raison il ne peut être piloté par une sortie GPIO directement. Lutilisation dun relais permet de changer la tension de 3.3V à 5V et de mettre à disposition le courant nécessaire. On peut renverser le mouvement en changeant la polarisation du moteur. Par contre, le moteur marchera toujours à vitesse maximale.Exercice 2: Contrôle par L298N ou L293D
Connecter le moteur DC comme décrit dans la page Moteurs.- Écrire un programme qui fait marcher le moteur à pleine vitesse en avant pour 5s. Arreter le mouvement. Faire marcher le moteur dans le sense inverse pour 5s.
- Rajouter au programme le code qui augment lentement la vitesse du moteur jusquau maximum et qui la diminue en suite jusquà larrêt.
Exercise 3: Contrôle de vitesse par potentiomètre
Utiliser un potentiomètre pour contrôler la vitesse du moteur. Le potentiometre est connecté à L'ADC du ESP32.Exercice 4: Le servomoteur
Pour les connexions et le pilote voir la page Moteurs- Ècrire un programme qui bouge le moteur entre 0 dégrées et 180 dégrées et retour.
- Écrire un programme qui permet de bouger le servomoteurs entre 0 dégrées et 180 dégrées avec un potentiomètre.
Comments


| I | Attachment | History | Action | Size | Date |
Who | Comment |
|---|---|---|---|---|---|---|---|
| |
L293D.png | r1 | manage | 199.5 K | 2022-03-06 - 10:54 | UliRaich | |
| |
dcMotorProp.png | r1 | manage | 51.4 K | 2022-03-06 - 09:49 | UliRaich | |
| |
l298.png | r1 | manage | 179.0 K | 2022-03-06 - 10:42 | UliRaich | |
| |
servo.png | r1 | manage | 143.0 K | 2022-03-06 - 09:49 | UliRaich | |
| |
stepping.png | r1 | manage | 152.3 K | 2022-03-06 - 09:49 | UliRaich |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
|
|
|
Ideas, requests, problems regarding TWiki? Send feedback